
Technology in brief
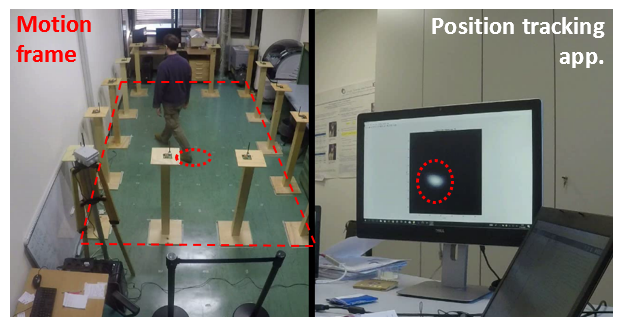
Sensor-less Wireless Vision is based on the continuous monitoring of wireless signals, it is designed to perform real-time tracking of object motion (humans, robots, machines) in line-of-sight, non-line-of-sight, and through-the-wall scenarios. Subjects affect the electromagnetic field in a predictable way such that it is possible to track their movements in the space. The subjects may be actively avoiding localization, or they may be passive and not emitting any useful signals; however, a wireless network deployed to locate them may contain elements which actively transmit.
Some Applications.
- Ambient intelligence, ambient assisted living
- Shared human-robot smart spaces
- Emergency and rescue operations, patient monitoring in medical facilities
- Anti-terrorism or law enforcement
- Localization, tracking and counting people in outdoor/indoor areas of interest (e.g., home and industrial automation applications)
- Measure usage statistics in train/subway stations, buildings and stores (e.g, pedestrian traffic monitoring and modeling)
- Passenger access counting
“It’s not difficult. Every time I lift my arm, it distorts a small electromagnetic field that is maintained continuously across the room. Slightly different positions of my hand and fingers produce different distortions and my robots can interpret these distortions as orders. I only use it for simple orders: Come here! Bring tea! and so on.” Isaac Asimov, The robots of the dawn, 1983.

Milano, 2021 Laboratori dEib Wavelab. Foto di Matteo Bergamini, © Lab Immagine Design POLIMI (progettazione, produzione e gestione di prodotti comunicativi) Dipartimento di DESIGN, Politecnico di Milano – 02-2399.7805/06 – labimmagine-design@polimi.it